FollowMe was a project for NIWC (Naval Information Warfare Center) to turn a Boston Dynamics Spot into a “human follower” that can be controlled from (and eventually track) a smartwatch. The full system had three pillars: smartwatch command/control, computer vision tracking, and Bluetooth direction finding.

I will mainly go over my part: building and stress-testing a Bluetooth-based follower that tries to estimate where the user is (relative to Spot) using BLE radio measurements—especially useful when the user is out of the camera’s view.
The Bluetooth idea (in one paragraph)
If the user (or their smartwatch) periodically transmits BLE packets with a Constant Tone Extension (CTE), a receiver with an antenna array can sample IQ data across its antennas and estimate the signal’s Angle of Arrival (AoA). If we combine that angle with an approximate range estimate from RSSI (signal strength), we can synthesize a 3D position of the beacon and feed it into the robot’s follower controller.
That’s the dream. The reality is: real environments are brutal (multipath, interference, reflections, body-blocking), and with only one locator you don’t get true triangulation—so filtering and sanity checks matter a lot.
Hardware + tools I worked with
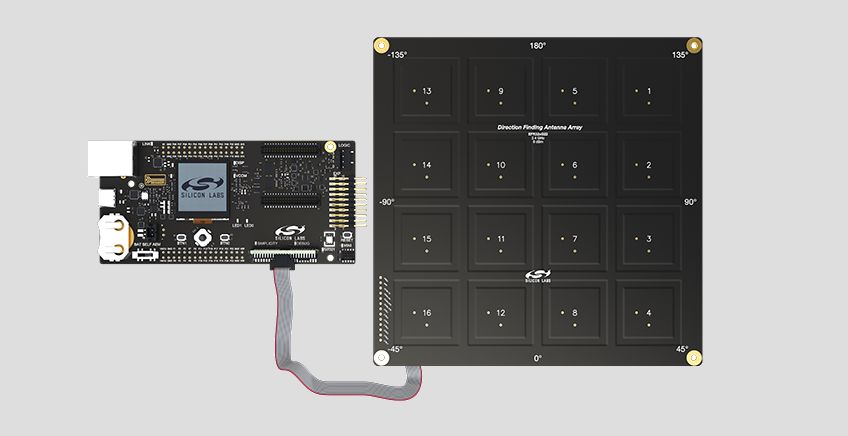
Receiver (on the robot)
- Silicon Labs BG22 Bluetooth Dual Polarized Antenna Array Pro Kit (a 4×4 dual-polarized URA)
Tag / beacon (carried by the user)
- During development we used an EFR32BG22 Thunderboard as a controllable BLE tag (easier firmware access)
- Long-term goal: use the Samsung Galaxy Watch Ultra as the beacon so the user carries less hardware
Dev stack
- Simplicity Studio + Silicon Labs direction-finding SDK / RTL library
- C for pulling data off the board
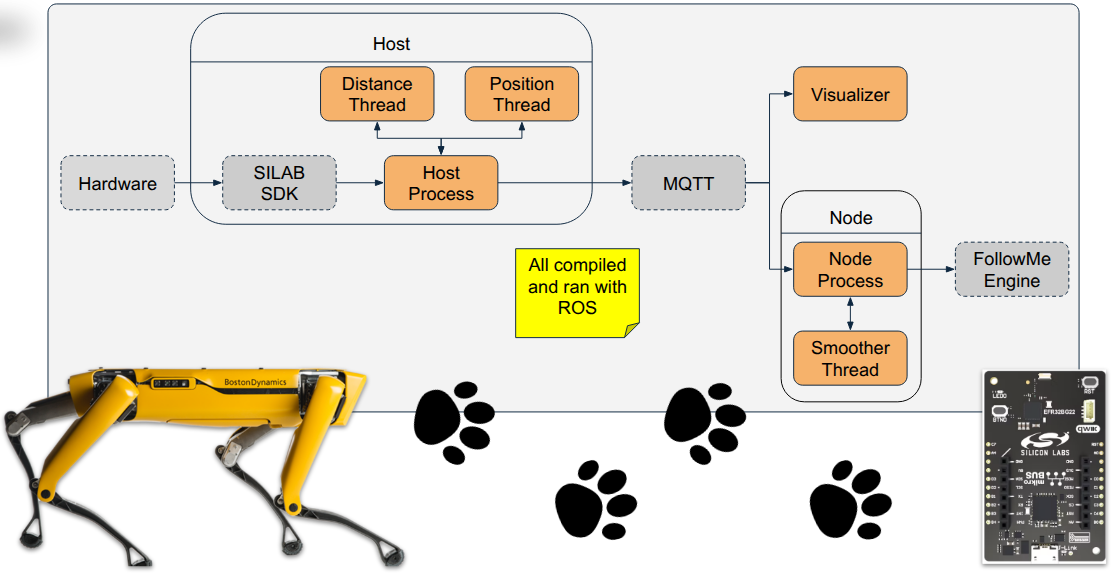
- Python for processing + ROS plumbing
- ROS1 Noetic on Ubuntu 20.04 for messaging and integration
Pipeline: IQ → angle, RSSI → range, fuse → position
1) AoA from IQ samples
Each BLE packet’s CTE gives phase-coherent IQ samples. Across an antenna array, phase differences encode the incoming wave direction. The estimator (Silicon Labs RTL / MUSIC-style approach) outputs:
- azimuth: θ
- elevation: φ
I then applied a lightweight smoother to reduce one-frame spikes:
(We used a fairly aggressive
2) Range from RSSI (log-distance path loss)
RSSI-based ranging is inherently squishy, but it’s the simplest way to get a distance proxy:
To keep it from going totally off the rails, I added an outlier rejection (e.g., ignore sudden RSSI jumps larger than a set threshold) and averaged across antenna elements to reduce fading noise.
3) Spherical → Cartesian
Once you have (
That
What worked vs what didn’t
What worked
- We could reliably get real-time AoA updates at decent frequency
- The end-to-end chain “beacon → estimate → ROS topic” worked, and was ready to plug into a controller
- In clean RF environments, the direction signal was often “correct enough” to be meaningful
What didn’t (and why we didn’t fully ship Bluetooth-following)
- Multipath indoors can make the “strongest path” not the direct path, so the angle estimate jitters or locks onto reflections
- RSSI ranging is not a tape measure—two steps and a body turn can change it dramatically
- With a single locator, you’re fundamentally limited: you’re estimating position from (angle + shaky range) instead of triangulating from multiple receivers
- In our trials, the Bluetooth position estimates were too noisy/inaccurate to trust as the primary follower, so the project leaned harder on the vision-based follower for the final integrated demos