Radio Telemetry Tracker (RTT) is a long-running project under Engineers for Exploration that supports field researchers—most notably the San Diego Zoo Wildlife Alliance—in tracking small wildlife using radio telemetry.
Traditionally, researchers locate animals by walking transects with a directional antenna and handheld receiver, listening for beacon “beeps” and manually triangulating positions. This works, but it’s slow, physically demanding, and doesn’t scale when multiple animals are tagged.
![]()
RTT automates this workflow by mounting a directional antenna and software-defined radio (SDR) on a drone (and later, tower prototypes), enabling rapid aerial surveys. The SDR captures tag signals; onboard software detects pings and estimates locations in (near) real time, streaming telemetry to a ground station UI.
I led RTT for a little over a year. Most work described here was done during my lead period, after reviving a dormant system and updating it for new hardware/software. For granular contributions and implementation details, see the repositories listed at the end.
System overview
At a high level, RTT is a closed loop:
- Plan a flight (pre-programmed search pattern).
- Collect RF (SDR + directional antenna + LNA).
- Detect pings (digital signal processing).
- Fuse with GPS (timestamp alignment).
- Estimate location (incremental localization per frequency).
- Visualize + log (offline-capable ground control UI).
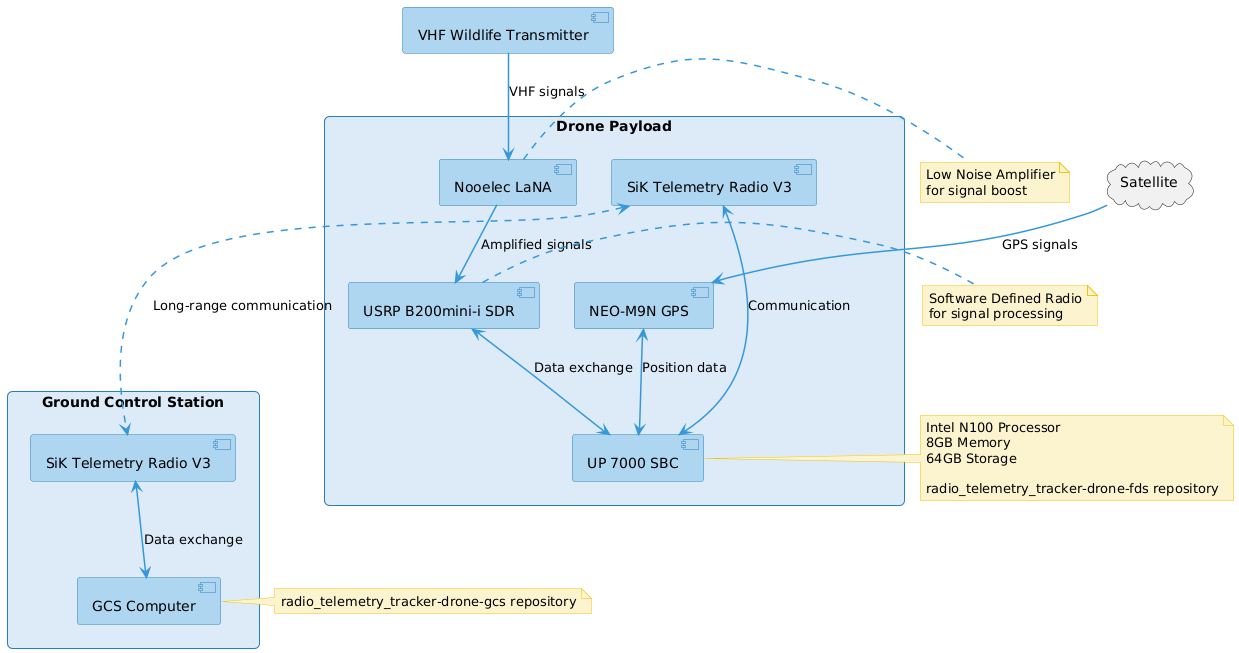
Data flow (bird’s-eye view)
-
Drone payload (Field Device Software / FDS)
- Reads GPS + heading
- Streams SDR IQ → detects pings (frequency + amplitude + time)
- Associates pings with nearest GPS sample
- Produces:
- raw ping events (for replay + auditing)
- rolling location estimate(s) per transmitter frequency
-
Ground Control Station (GCS)
- Configures scan parameters (gain, sample rate, target freqs, etc.)
- Starts/stops missions
- Displays live GPS track + pings + estimates on an offline map
- Logs everything for post-flight review
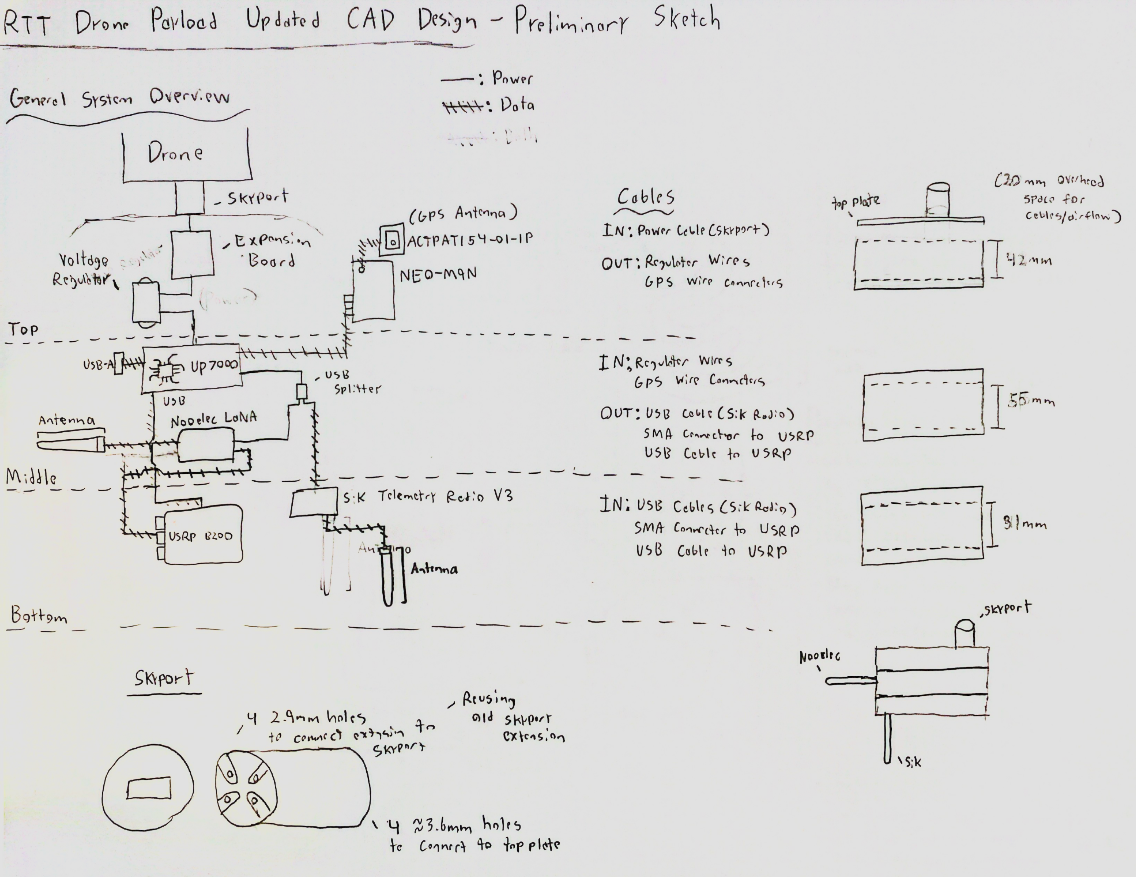
Hardware refresh
When I took over, the project had been dormant and the prior build targeted outdated hardware. Our goals for the refresh:
- Easy to assemble (field-friendly)
- Enough compute for real-time DSP
- Reliable comms + logging
- Modular interfaces (so we can swap radios/SDRs/GPS)
Selected parts
-
Single Board Computer (SBC): UP 7000 (Intel N100, 8GB RAM, 64GB eMMC)
Chosen for x86 library compatibility (DSP tooling tends to be better supported on x86 than ARM), while still fitting Raspberry Pi–style mounts/cases. -
GPS + Compass: SparkFun NEO-M9N Breakout
Standard, accurate, and easy to integrate. -
SDR: USRP B200mini-i
Expensive, but excellent performance, flexible gain control, and a path toward FPGA acceleration later. -
LNA: Nooelec LaNA
Boosts weak tag signals. -
Telemetry radio: SiK V3
In hindsight, not the best choice: we ended up needing an aluminum enclosure for EMI shielding near the SBC/SDR. If cost weren’t a constraint, we’d likely use a more robust link (and/or diversity antennas).
Because we used a DJI Matrice 350 RTK, we were able to power the payload via DJI SkyPort + Extension, simplifying wiring and power budgeting.
Signal processing (DSP): “find pings in the air”

Most wildlife tags in this domain are simple OOK-style beacons (on-off keyed carriers), so the core DSP problem is:
Given a noisy wideband signal, detect short bursts at known (or partially known) carrier frequencies, robustly and fast.
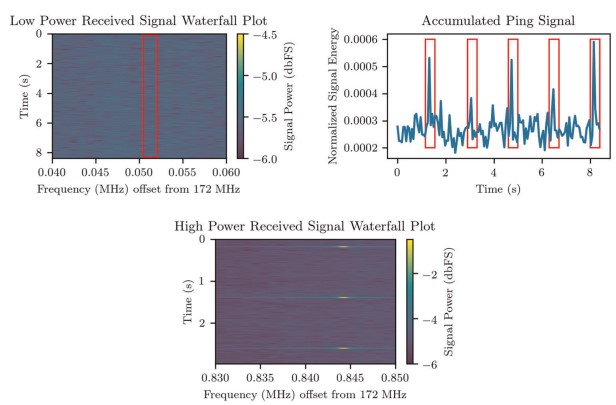
The system samples IQ data from the SDR, then runs a ping detector tuned to:
- expected pulse width (ms)
- SNR threshold
- frequency list (or swept band)
- gain + sampling rate + center frequency
High-level detector concept
A typical approach looks like:
- Channelize / band-limit around target frequencies
- Compute energy envelope over short windows
- Threshold + duration filtering to decide “ping” vs noise
- Emit
(timestamp, frequency, amplitude)events
Even when the DSP is “naive,” real-time wideband processing is still compute-heavy, which is why the x86 SBC helped.
Interesting (but still high-level) localization math
A pragmatic first-pass localization uses a path-loss-ish model:
Where:
is received power (or a proxy, like amplitude) is distance from transmitter to receiver is an effective intercept term (tx power + gains) is the path loss exponent (environment-dependent)
Then we solve for the best transmitter position by minimizing residuals over many ping observations:
In practice, we keep this bounded and incremental so it behaves in the field.
Here’s the core idea as implemented in the DSP library’s LocationEstimator (least-squares residuals on distance-to-power):
# rct_dsp2/localization.py (excerpt)
def __residuals(self, params: np.ndarray, data: np.ndarray) -> np.ndarray:
estimated_transmitter_x = params[0]
estimated_transmitter_y = params[1]
estimated_transmitter_location = np.array([estimated_transmitter_x, estimated_transmitter_y, 0])
estimated_transmitter_power = params[2]
estimated_model_order = params[3] # ~ n
received_power = data[:, 3]
received_locations = data[:, 0:3]
distances = np.linalg.norm(received_locations - estimated_transmitter_location, axis=1)
return received_power - (estimated_transmitter_power - 10 * estimated_model_order * np.log10(distances))
Field Device Software (FDS): robust “headless” deployment
The payload computer runs unattended during flights. That meant:
- autostart on boot
- no keyboard/monitor assumptions
- safe logging + crash evidence
- simple “operator mental model”
We configured Ubuntu to auto-login and launch RTT software on startup. We considered more elaborate physical UX (e.g., a 7-segment error display), but ultimately we prioritized:
- a simple “healthy/unhealthy” indicator concept
- detailed logs written to local storage (or USB) for post-flight debugging
GPS ingestion with safety checks
GPS dropouts and corrupted readings happen. The FDS includes validation and safety logic to reject nonsense jumps.
Example: position/altitude jump checks and quality thresholds:
# radio_telemetry_tracker_drone_fds/gps/gps_module.py (excerpt)
MAX_POSITION_JUMP = 1000 # meters
MAX_ALTITUDE_JUMP = 100 # meters per second
def _validate_data_safety(self, gps_data: GPSData) -> bool:
if not gps_data.validate():
return False
if not gps_data.check_quality():
return False
# reject sudden teleports
if self._last_valid_position is not None and gps_data.latitude and gps_data.longitude:
distance = self._calculate_distance(self._last_valid_position[0], self._last_valid_position[1],
gps_data.latitude, gps_data.longitude)
if distance > self.MAX_POSITION_JUMP:
return False
# reject impossible climb rates
if self._last_valid_altitude is not None and gps_data.altitude is not None:
altitude_rate = abs(gps_data.altitude - self._last_valid_altitude) / max(gps_data.timestamp - self._last_valid_time, 1e-3)
if altitude_rate > self.MAX_ALTITUDE_JUMP:
return False
gps_data.is_valid = True
return True
Ping logging + replay
Ping detections and estimates are logged to CSV with run identifiers and timestamps. This makes it easier to:
- reproduce bugs
- compare parameter changes
- re-run localization offline
Drone ↔ Ground communications: reliability first
We designed comms around two realities:
- A command being received is not the same as the action being executed.
- Field links drop packets. A lot.
So we used both:
- Implicit acknowledgments at the transport layer (packet delivery)
- Explicit acknowledgments at the application layer (operation completed)
Example: start sequence
- GCS → FDS:
StartRequest - Transport ensures delivery (retries/ACK)
- FDS begins processing and replies with
StartResponse(success=true) - GCS UI transitions state only after explicit response
Packet framing + CRC + Protobuf
To keep messages compact and structured, packets are Protobuf messages wrapped in a simple binary frame:
- sync marker
- big-endian length
- protobuf payload
- CRC-CCITT
# radio_telemetry_tracker_drone_comms_package/codec.py (excerpt)
SYNC_MARKER = b"\xAA\x55"
LENGTH_FIELD_SIZE = 4
CHECKSUM_SIZE = 2
class RadioCodec:
@staticmethod
def encode_packet(packet: RadioPacket) -> bytes:
message_data = packet.SerializeToString()
header = SYNC_MARKER + len(message_data).to_bytes(LENGTH_FIELD_SIZE, "big")
data_without_checksum = header + message_data
checksum_val = _calculate_crc16_ccitt(data_without_checksum)
return data_without_checksum + checksum_val.to_bytes(CHECKSUM_SIZE, "big")
Retries + outstanding ACK tracking
The transport layer maintains a queue and retries packets that require ACKs:
# radio_telemetry_tracker_drone_comms_package/transceiver.py (excerpt)
def _retry_outstanding_packets(self) -> None:
now = time.time()
to_remove = []
for pid, info in self.outstanding_acks.items():
if (now - info["send_time"]) >= self.ack_timeout:
if info["retries"] < self.max_retries:
info["retries"] += 1
info["send_time"] = now
self.radio_interface.send_packet(info["packet"])
else:
to_remove.append(pid)
for pid in to_remove:
del self.outstanding_acks[pid]
if self.on_ack_timeout:
self.on_ack_timeout(pid)
Ground Control Station (GCS): offline maps + real-time telemetry

The GCS needed to:
- work without internet in the field
- display a map + moving drone track
- show ping detections and location estimates
- keep install friction low
We experimented with ArcGIS/QGIS, but packaging and runtime weight were a pain. We ultimately built:
- PyQt6 desktop shell
- QWebEngine embedding a Leaflet.js frontend
- a local tile cache so maps can run offline
Offline tile caching (DB-first, then network)
The tile service checks a local SQLite cache first; if offline mode is enabled, it never fetches from the network.
# radio_telemetry_tracker_drone_gcs/services/tile_service.py (excerpt)
def get_tile(self, z: int, x: int, y: int, source_id: str, *, offline: bool) -> bytes | None:
tile_data = get_tile_db(z, x, y, source_id)
if tile_data is not None:
return tile_data
if offline:
return None
tile_data = self._fetch_tile(z, x, y, source_id)
if tile_data:
store_tile_db(z, x, y, source_id, tile_data)
return tile_data
Results
In field deployments, the system reduced multi-hour manual tracking sessions (e.g., ~4 hours) into a single short drone flight (e.g., ~20 minutes), while producing location estimates on the order of ~1 m in favorable conditions.
The system was used successfully in multiple field trials with the San Diego Zoo Wildlife Alliance, tracking small reptiles and mammals in difficult terrain.
Future direction: tower-based tracking + TDOA
As of late 2025, there is a non-trivial risk that regulatory and procurement constraints could restrict certain drone platforms in the U.S. Rather than betting everything on drone payloads, we explored a tower-based approach:
- solar-powered nodes
- long-duration monitoring (no battery-limited flights)
- mesh networking for data relay
A key technical bottleneck is localization. RSSI-based approaches struggle because each tower’s true gain/antenna placement/environment differ. A more robust direction is time difference of arrival (TDOA), but with OOK beacons and RF propagation at ~speed of light, timing synchronization and multipath make this a hard problem.
Repositories
- Docs: https://github.com/UCSD-E4E/radio-telemetry-tracker-docs
- Drone casing CAD: https://github.com/UCSD-E4E/radio-telemetry-tracker-drone-casing-cad
- Drone comms package: https://github.com/UCSD-E4E/radio-telemetry-tracker-drone-comms-package
- Drone FDS: https://github.com/UCSD-E4E/radio-telemetry-tracker-drone-fds
- Drone GCS: https://github.com/UCSD-E4E/radio-telemetry-tracker-drone-gcs
- Tower comms package: https://github.com/UCSD-E4E/radio-telemetry-tracker-tower-comms-package
- Tower solar tools: https://github.com/UCSD-E4E/radio-telemetry-tracker-tower-solar-tools
- DSP library (PingFinder + localization): https://github.com/UCSD-E4E/radio_collar_tracker_dsp2